
Un oeil sur la langue
D'une façon générale, les systèmes dits de "substitution sensorielle" transforment des stimuli propres à une modalité sensorielle ( par exemple la vision) en des stimuli d'une autre modalité sensorielle (vision, audition, toucher, odorat).
Un système de substitution sensorielle est décomposable en trois éléments distincts:
Des capteurs qui permettent la conversion d'une forme d'énergie en signaux interprétables par un système électronique de couplage responsable de l'activation coordonnée de stimulateurs.
La stimulation s'adresse en général à des récepteurs cellulaires d'organes sensoriels et est ainsi consommatrice d'énergie électrique qui peut être convertie en énergie mécanique dans le cas des prothèses visuo-tactiles.
Il est à noter que l'action joue un rôle essentiel dans ce processus. La substitution sensorielle ne peut se construire et fonctionner que via le maintien d'une activité exploratoire des capteurs.
L'accès à la perception qu'offrent les dispositifs de substitution sensorielle après la phase d'apprentissage peut être qualifiée "d'implicite " c'est-à-dire ne faisant pas appel à un raisonnement conscient sur les sensations perçues via le système de stimulation.
La page suivante examine les systèmes qui convertissent les signaux optiques en signaux tactiles.
(une page "Dispositifs visuo-auditifs" est traitée séparément).
Le premier système mis au point par Bach y Rita était si immense qu'il était nécessaire d'utiliser une pièce complète:
|
|
Un des premiers modèles de TVSS ( = "tactile vision substitution system") La caméra capte des images pouvant être transmises sur une grille de pixels sous forme de stimulation électrique sur le corps |
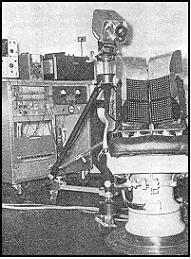
Ce tout premier système de substitution sensorielle exploitait la sensibilité de la peau du dos pour transmettre l'information visuelle.
La grille éléctrotactile était montée sur une énorme chaise de dentiste. La caméra était difficilement amovible, ce qui rendait la perception d'objets dans l'espace plus difficile.
En effet, plusieurs études démontrent que, pour que la sensation ressentie sur la peau soit interprétée comme provenant d'un objet dans l'espace, il est nécessaire d'avoir le contrôle sur la caméra, sinon il est plus difficile de faire cette généralisation.
Les premières expériences avec le TVSS n'arrivaient pas à faire identifier les objets par les sujets. Cet échec reflétait la nécessité de pouvoir contrôler la caméra pour extérioriser la sensation sur la peau, et ne plus rapporter une sensation sur le dos, ou le ventre, mais bien à un endroit dans l'espace.
Il semblerait donc que l'expérience visuelle requiert la possibilité de pouvoir modifier l'impression sensorielle de façon contrôlée. Il est nécessaire que le sujet puisse modifier son point de vue par rapport à l'objet et que cette modification de l'emplacement du sujet se traduise par une modification perceptuelle liée au changement de perspective.
Actuellement, il existe des dispositifs tels le Tongue Display Unit (TDU) beaucoup plus petits, et, avec l'avènement des microtechnologies, il est très facilement portatif.
|
|
|
Mike Ciarciello, interviewé dans abcnews, en septembre 2006 http://news.bbc.co.uk/nolavconsole/ifs_news/hi/newsid_6170000/newsid_6170500/nb_rm_6170531.stm |

L'usage de la langue a été préféré à celui de la peau du dos ou du ventre à cause de la surreprésentation corticale de la langue relativement aux autres parties du corps ( voir l'homunculus).
{kind=link}
Cette surreprésentation est sans doute encore plus augmentée par la plasticité qui se produit suite à un entraînement à cet outil. Bien que le TDU ne dispose que de très peu de pixels pour représenter une image visuelle complexe, et est très nettement inférieur à la résolution de la vision, il est quand même possible d'accomplir certaines tâches perceptuelles complexes, telles la reconnaissance de visage, jugements de vitesse, perception de directions de mouvements d'objets.